Stereotaxic Device
Integrated Stereotaxic Instrument for Preclinical Neuroscience
This project develops a compact stereotaxic instrument that makes small-animal neuroscience procedures faster, more precise and easier to reproduce. Its all-in-one design combines animal-centric immobilization, essential surgical accessories, electronics and high-precision motion control to reduce operator effort and streamline demanding experimental workflows.

Project Scope and Engineering Problem
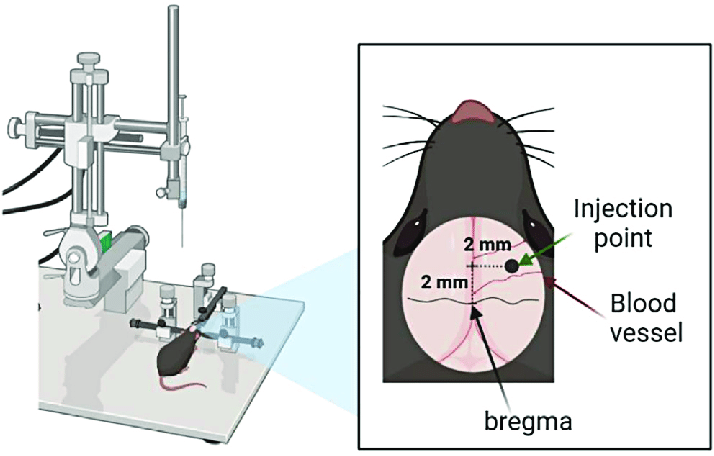
Stereotaxic instruments are essential in neuroscience and preclinical research because they allow controlled access to specific brain regions in small animal models. Their mechanical function is demanding: the animal must be immobilized reliably, the target point must be reached accurately, and the procedure must remain repeatable across operators and experiments.
Conventional systems often require time-consuming immobilization, careful operator skill and additional adaptors or improvised accessories for different experimental protocols. These practical limitations increase procedure time, raise the chance of user error and make reproducibility harder to maintain in high-throughput research settings.
MD-Lab’s Contribution
MD-Lab’s contribution focuses on the mechanical design and prototyping of a more integrated stereotaxic platform. The work combines animal handling, structural layout, precision positioning, electronics integration and operator ergonomics into a compact instrument architecture.
The development pathway moved from a manually operated 3D-printed proof-of-concept prototype to a fully motorized metal version manufactured through precision cutting and machining. This progression allowed the design to be explored first for usability and then for higher accuracy, repeatability and operator convenience.
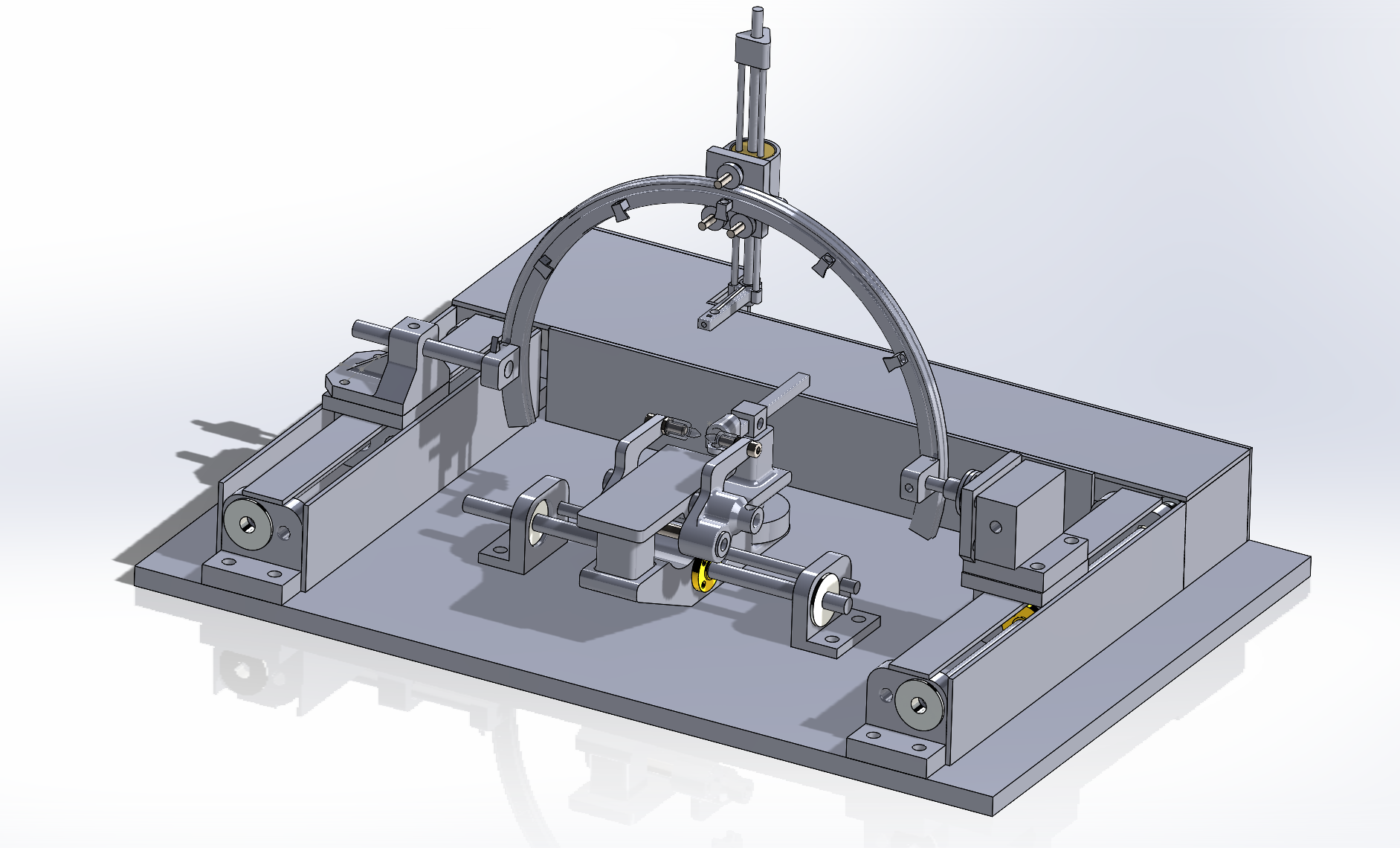
Integrated Instrument Architecture
The instrument architecture brings the animal platform, stereotaxic arc, positioning axes and tool carrier into one coordinated assembly. This integrated layout supports a clearer experimental sequence, from immobilization and access to controlled positioning of the working tool.
The CAD development emphasizes compactness, axis alignment and reduced dependence on separate fixtures. By treating the mechanical frame and motion elements as one system, the design improves setup consistency before the instrument is translated into manufactured prototypes.
From Conventional Setup to Integrated Platform
Traditional stereotaxic workflows require separate tools, adaptors and positioning elements to complete the immobilization and targeting sequence. The integrated concept responds by bringing the main subsystems into a single platform, reducing setup complexity and making the workflow more approachable for less experienced users.
The design direction is animal-centric: immobilization is treated as a core mechanical function of the device, not a peripheral step. This supports faster setup, better access to the operative area and more consistent positioning before the targeting stage begins.
Prototype Development and Motion Control
The 3D-printed manual prototype supported early proof-of-concept testing and ergonomic evaluation. It allowed the overall layout, immobilization approach and handling sequence to be assessed before committing to a more robust manufactured system.
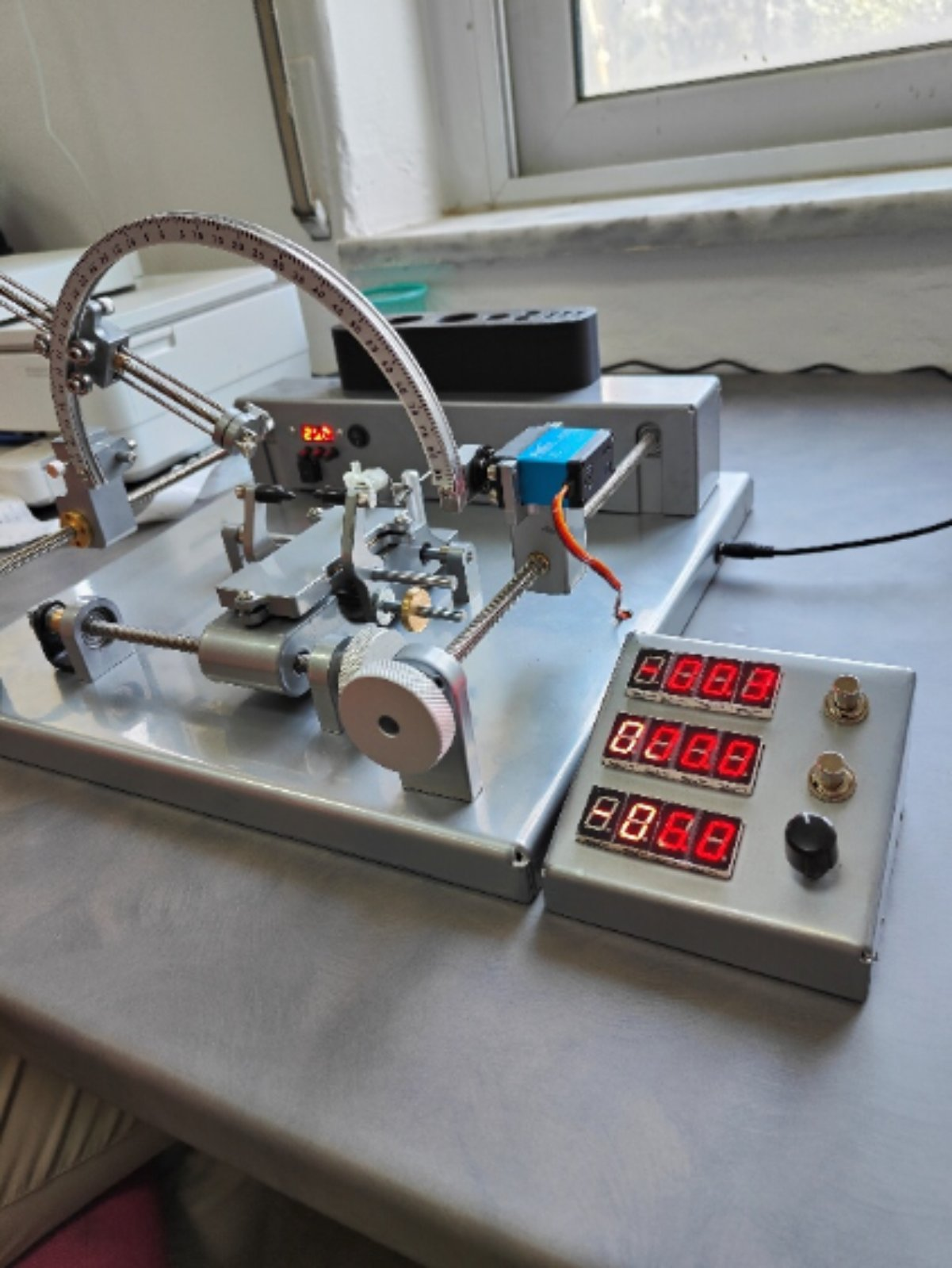
The machined-metal prototype introduces motorized positioning and integrated electronics. High-precision motors support more controlled targeting, while the all-in-one instrument layout reduces the need for external components and improvised modifications during experimental preparation.
Main Outcomes
The integrated platform targets shorter experimental duration, reduced operator effort and improved reproducibility. By organizing the essential tools, positioning functions and control hardware into one device, the design helps minimize user error and supports more consistent preclinical workflows.
The two-prototype pathway demonstrates scalability from a basic manually operated research tool to a more advanced motorized system. This is important for laboratories with different levels of throughput, budget and automation need.
Engineering Significance
The project matters as a machine-design problem because stereotaxic performance depends on the interaction of structure, positioning accuracy, ergonomics, animal restraint and workflow reliability. Improvements in any one element are not enough unless they remain compatible with the full experimental procedure.
By treating the stereotaxic instrument as an integrated mechatronic platform, the development reduces dependence on add-on hardware and specialist improvisation. The result is a clearer path toward accessible, repeatable and higher-throughput stereotaxic experimentation for neuroscience laboratories and training environments.





